Полезное:
Как сделать разговор полезным и приятным
Как сделать объемную звезду своими руками
Как сделать то, что делать не хочется?
Как сделать погремушку
Как сделать так чтобы женщины сами знакомились с вами
Как сделать идею коммерческой
Как сделать хорошую растяжку ног?
Как сделать наш разум здоровым?
Как сделать, чтобы люди обманывали меньше
Вопрос 4. Как сделать так, чтобы вас уважали и ценили?
Как сделать лучше себе и другим людям
Как сделать свидание интересным?

Категории:
АрхитектураАстрономияБиологияГеографияГеологияИнформатикаИскусствоИсторияКулинарияКультураМаркетингМатематикаМедицинаМенеджментОхрана трудаПравоПроизводствоПсихологияРелигияСоциологияСпортТехникаФизикаФилософияХимияЭкологияЭкономикаЭлектроника
Метод подсветки
Данный метод состоит в проецировании светового потока на группу объектов и использовании изменения формы потока для вычисления расстояния (рис. 20.2).
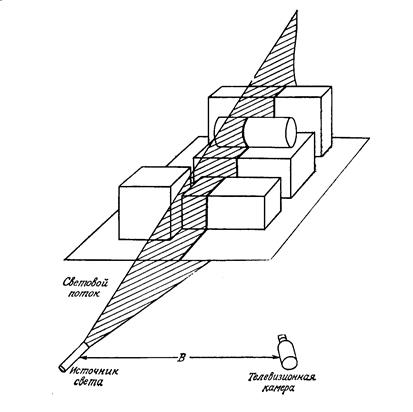
Рисунок 20.2. Измерение расстояний методом подсветки
Световая полоса, пересекающая группу предметов, формируется в виде плоского пучка света с помощью цилиндрических линз. Пересечение светового потока с объектами в рабочем пространстве фиксируется телевизионной камерой, помещенной на расстоянии В от источника света. Такая ситуация легко анализируется компьютером при определении расстояния. Например, отклонение пучков света указывает на изменение поверхности, а разрыв соответствует промежутку между поверхностями.
Для получения базовых значений расстояний вначале проводят калибровку (рис. 20.3).

Рисунок 20.3. Калибровка системы измерения методом подсветки
В большинстве систем, основанных на методе подсветки, используют цифровые изображения, полученные телекамерой и преобразованных в цифровой массив размерностью N×M. Пусть  является номером столбца этого массива. Калибровка состоит в измерении расстояния В между источником света и центром линз и последующим измерением углов
является номером столбца этого массива. Калибровка состоит в измерении расстояния В между источником света и центром линз и последующим измерением углов  и
и  . Тогда расстояние d вычисляется по формуле:
. Тогда расстояние d вычисляется по формуле:
 , (20-1)
, (20-1)
где  - фокальная длина линз, а
- фокальная длина линз, а
 . (20-2)
. (20-2)
Для цифрового изображения, содержащего М столбцов, приращение растояния  между столбцами определяется по формуле:
между столбцами определяется по формуле:
 (20-3)
(20-3)
для  . В изображении на мониторе
. В изображении на мониторе  соответствовало бы крайнему слева столбцу, а
соответствовало бы крайнему слева столбцу, а  - центральному столбцу.
- центральному столбцу.
Угол  , образованный проекцией произвольной полосы, легко получить, отметив, что:
, образованный проекцией произвольной полосы, легко получить, отметив, что:
 , (20-4)
, (20-4)
где  , (20-5)
, (20-5)
или, используя равенство (20-3),
 , (20-6)
, (20-6)
где .
Для оставшихся значений k (т.е. по другую сторону оптической оси) имеем:
 , (20-7)
, (20-7)
где
 (20-8)
(20-8)
для  .
.
Сравнивая уравнения (20-6) и (20-8), отметим, что  . Таким образом, равенства (20-4) и (20-7) идентичны для всего диапазона
. Таким образом, равенства (20-4) и (20-7) идентичны для всего диапазона  . Тогда из рис. 20.3 следует, что расстояние по нормали
. Тогда из рис. 20.3 следует, что расстояние по нормали  между произвольной полосой света и плоскостью отсчета будет равно:
между произвольной полосой света и плоскостью отсчета будет равно:
 (20-9)
(20-9)
для , где вычисляется либо из уравнения (20-4), либо из уравнения (20-7).
Важно отметить, что если величины  известны, номер столбца в цифровом изображении полностью определяет расстояние между плоскостью отсчета и всеми точками на полосе, отображенной на этом столбце.
известны, номер столбца в цифровом изображении полностью определяет расстояние между плоскостью отсчета и всеми точками на полосе, отображенной на этом столбце.
Для определения  плоскую вертикальную поверхность размещают так, чтобы ее пересечение со световой полосой находилось в центре плоскости изображения (т.е. у=М/2). Затем измеряют величину перпендикуляра
плоскую вертикальную поверхность размещают так, чтобы ее пересечение со световой полосой находилось в центре плоскости изображения (т.е. у=М/2). Затем измеряют величину перпендикуляра  между поверхностью и плоскостью отсчета. Из рис. 20.3 следует, что:
между поверхностью и плоскостью отсчета. Из рис. 20.3 следует, что:
 . (20-10)
. (20-10)
Чтобы определить  , перемещают поверхность ближе к плоскости отсчета, пока ее световая полоса не совместится с у=0 на плоскости изображения. Затем измеряют
, перемещают поверхность ближе к плоскости отсчета, пока ее световая полоса не совместится с у=0 на плоскости изображения. Затем измеряют  и из рис. 20.3 находят:
и из рис. 20.3 находят:
 . (20-11)
. (20-11)
Это завершает процесс калибровки.
Основное преимущество такой системы состоит в относительной простоте измерения расстояний. После завершения калибровки расстояние, соответствующее каждому столбцу в изображении, вычисляется с помощью уравнения (20-9), где  , а результаты хранятся в памяти. Затем в процессе измерений расстояние до любой точки изображения получают путем простого определения номера ее столбца в изображении и обращения к соответствующей области памяти.
, а результаты хранятся в памяти. Затем в процессе измерений расстояние до любой точки изображения получают путем простого определения номера ее столбца в изображении и обращения к соответствующей области памяти.
Date: 2015-08-15; view: 378; Нарушение авторских прав; Помощь в написании работы --> СЮДА... |